Regularizing Neural Network
Regularization 是 machine learning 中常見的技術,用於限制模型參數和權重,以減少模型對訓練數據過度擬合的可能性。而當我們將其套用到 Neural Network 上時,也有 Frobenius Norm 以及 Weight Decay 等技術可以做到 regularization。此外,我們也會使用 Dropout Regularization 來避免 Overfitting,而 Data Augmentation 和 Early Stopping 也是可以用來避免 Overfitting 的方法。本文將會詳細解釋這些技術,以及它們彼此之間的關係。
Regularization
- 我們在 machine learning 中也有提到的 regularization
- 我們重新提出,並且將他應用到 neural network 中
- 這是 logistic regression 使用 regularization
- 後面加的這一項 regularization 可以細分為 L2 和 L1 regularization
- L2 就是上面寫的
- L1 就是沒有平方的版本
- 因為 L1 會產生 sparse matrix (很多 entries 為 0)
- 所以通常大家都使用 L2
- L2 就是上面寫的
Regularization in Neural Network
- 在 nn 中所用到的 L2 regularization 稱為 Frobenius Norm (F 底標記)
- 也就是整個 每個 entries 的平方和
- 所以整個包含 regularization 的 neural network cost 為
Weight decay
- 另外,當 L2 套用之後,會讓 gradient descent 在每次更新時, 都會乘以一個小於 1 的數
- 所以 L2 又稱為 weight decay
Regularization Intuition
- 這裡講解的 regularization 原因和 machine learning 裡類似
- 但是是以 nn 為基底來解釋
Intuition 1
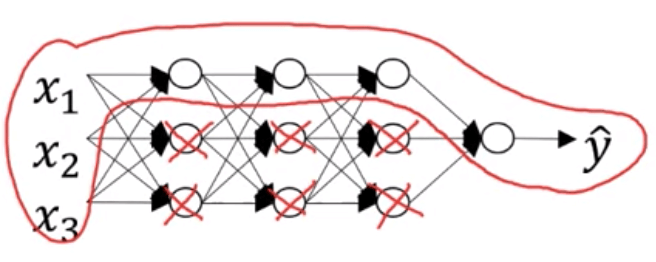
- 在 regularization 中 增加
- parameters 中一些不重要的 unit 就會被降低
- 這就像把一些 neuron 從 nn 中去除掉,變成一個較小的 nn
- 進而避免 overfitting
Intuition 2
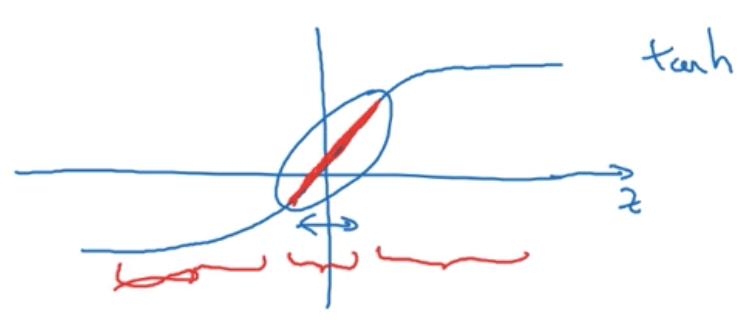
- 假設 activation function 為 tanh
- Regularization 將 上升
- 所以 就會下降
- 進而影響 變小
- 降低 我們就會得到 unit 的值介於上圖中間紅色 linear 區域
- 此時 tanh(z) 會接近 linear function
- 整個網路就會近似 linear nn 一樣,不會 overfitting
Dropout Regularization
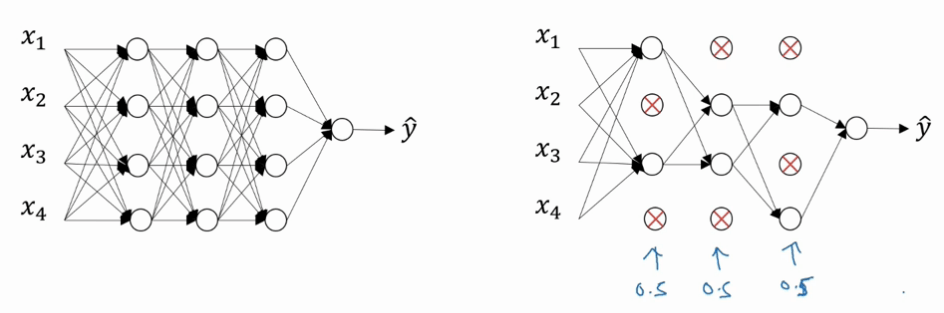
- Dropout 對每一個 hidden layer 設定一個隨機消除 neuron 的機率
- 會讓每次訓練的 nn 變成一個較小的 nn
- Dropout 通常使用於 Computer vision
- 通常會使用 Inverted dropout 來 implement dropout
- 以下是對第 l 層進行 dropout 的過程
keep_prob = 0.8 # hold neuron probability
dl = np.random.rand(al.shape[0], al.shape[1]) < keep_prob
al = np.multiply(al, dl)
al /= keep_prob
- 有點類似遮罩的感覺,將
al乘以 0/1 遮罩dl - 最後
al /= keep_prob就是 inverted dropout 的精神- 是為了避免下一層計算發生錯誤
- 因為 al 有些 neuron 被歸零
- 所以我們在沒被歸零的 neuron 上補回 20% 期望值
- 另外,別在 test 時使用 dropout,會讓預測結果隨機化
Dropout Intuition
- 因為一個 neuron 會接收多個 features 並分配 weights 給他們,然後計算後輸出
- 但現在任何一個 features 都有可能消失
- 所以這個 neuron 在 weights 上會更平均的分配
- 這就類似 L2 在 shrink weights 的做法
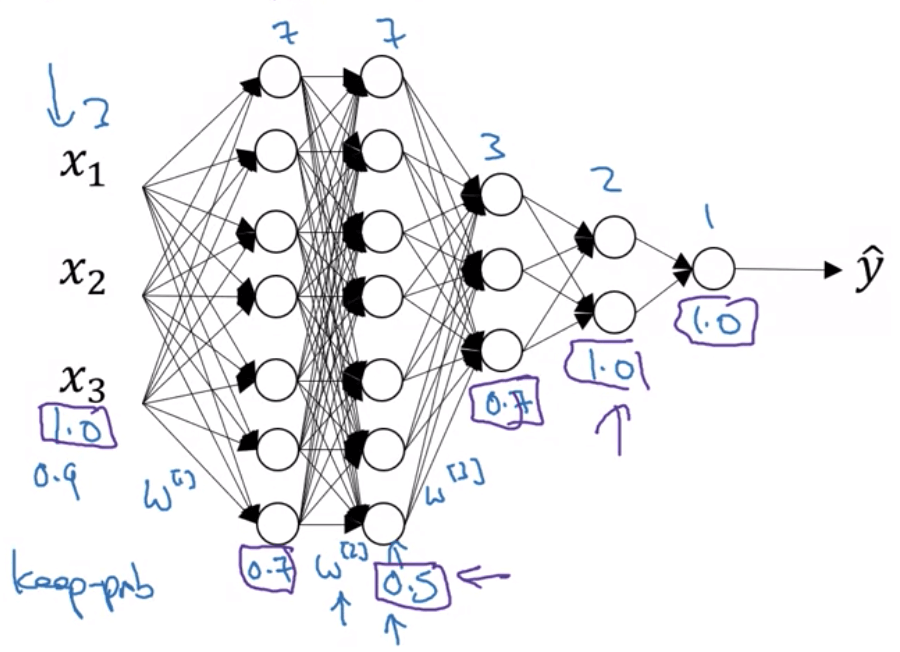
- 對於不同的 layer 設定的
keep_prob也不同 - 通常較少 hidden units 的 layer 的
keep_prob = 1- Input layer 通常也為 1
- 越多 features (weights 越大) 的 layer 的
keep_prob越小越好 - Dropout 有一個大缺點
- 就是無法正確定義出
- 所以無法邊訓練邊看 cost function 是否正確遞減
- 通常需要將
keep_prob先全部設定回 1 再觀察
Other regularization methods
Data Augmentation
- Overfitting 往往可以依靠增加 data 數量來緩解
- 利用修改圖片 (flip, stretch, crop, ...),來產生更多新的 data
Early Stopping

- 我們將 train error 和 dev error 同時 plot 在一起
- 當 train error 持續下降而 dev error 卻上升時
- 就是 overfitting 的開始
- 所以我們在此時停止 iteration,並返回 dev error 在最小時的參數
- 好處是不需要嘗試大量 L2 regularization
- 但 early stopping 有一大缺點
- 他違反了 orthogonalization
Orthogonalization
- 在處理一個 nn 時,我們偏向專注於一次一件事情上
- 第一件事是 optimize cost function
- 會用 gradient descent 等方式處理
- 第二件事是 not overfitting
- 會用 regularization 等方式處理
- 但 early stopping 既不跑完 optimization 還要時刻注意 overfitting 問題
- 將兩件事情耦合在一起